<전기자전거의 원리>
여행 와서 하루종일 걸어다니기 너무 힘들다...
전기 자전거를 타야겠다
- 글 화학생물공학부 2 김민서
- 편집 건설환경공학부 3 김기윤
들어가는 글
지난 호에서 김공대는 입국 절차를 스마트하게 마치고 여행을 무사히 떠난 듯하네요.
설렘 가득한 마음으로 프랑스에 도착한 김공대는 교환학생으로 프랑스에 온 서울대 공대 동기 최효율을 만났습니다. 김공대는 프랑스 관광을 하는 동안 어떤 것을 보게 되었을까요?
본문
김공대: 프랑스 구경하니까 신기한 것도 많이 보고 너무 좋다! 근데 다리가 너무 아프네…
프랑스 관광을 하면서 하루 종일 걷느라 힘든 김공대는 주변을 두리번두리번 살펴봅니다.

김공대: 주변을 보니 유럽 사람들은 전기 자전거를 많이 타는 것 같네?
최효율:
맞아! 요즘은 전기 자전거 빌리기도 편하고, 걷는 것보다 시간 절약도 되고,
운동도 돼서 여러모로 효율적이야.
요새 유럽에서는 전기 자전거를 타는 사람이 정말 많아!
김공대: 그렇구나! 엄청 빨라 보이던데?
최효율: 그리고 무엇보다 전기 자전거가 일반 자전거보다 더 빠르고 힘이 덜 필요하니까 정말 편해.
김공대: 오 진짜 그렇겠다! 근데 전기 자전거는 일반 자전거랑 뭐가 어떻게 다르길래 그렇지?
전기 자전거에 대해 궁금증이 생긴 김공대는 전기 자전거에 어떤 부품들이 있고, 각각 어떤 역할을 하는지 알아보기로 결심합니다.
전기 자전거는 뭐가 다를까? - 다양한 부품의 역할
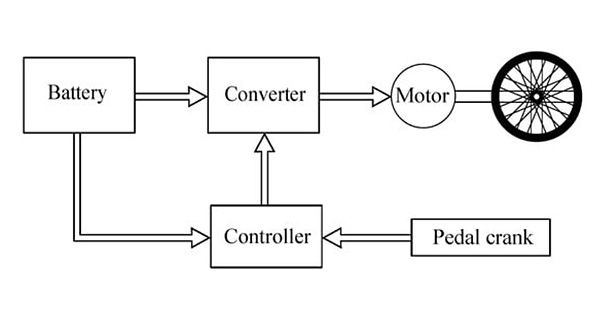
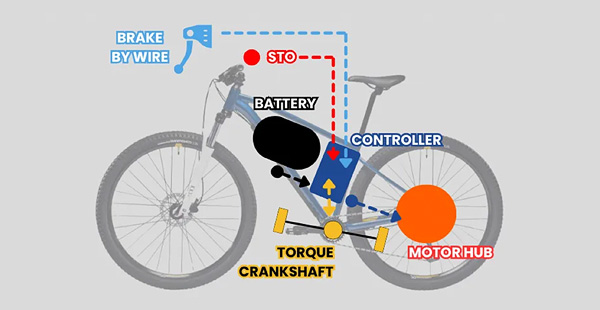
전기 자전거를 구성하는 핵심적인 부품으로는 모터, 센서, 컨트롤러 (제어기) 그리고 배터리가 있습니다.
일반적으로 전기 자전거의 힘은 바퀴에 있는 허브 모터 (BLDC) 혹은 페달 축에 있는 미드 드라이브 모터에서 나옵니다. 허브 모터 같은 경우에는 구조가 단순해 가격도 저렴하고, 정비가 쉽다는 장점이 있습니다. 반면 미드 드라이브 모터는 자전거의 기어를 함께 사용하기 때문에 언덕과 같이 가파른 길에서 유리합니다.
전기 자전거의 페달을 밟을 때 모터가 얼마나 돌아가면서 보조력을 줄지 판단하는 역할은 센서와 컨트롤러(제어기)가 담당합니다. 먼저 센서가 앞길과 주변에 대한 정보를 모아 컨트롤러에 전달하고, 컨트롤러는 배터리의 전기를 사용하여 모터에 힘을 보내줍니다. 이 과정에서 배터리는 단순히 전기만 공급하는 것이 아니라, 'BMS1)'라는 배터리 관리 시스템과 연동됩니다. BMS는 과충전, 과방전 그리고 과전류를 방지하고 전기 자전거의 안전성을 높여 주기도 합니다.
김공대: 근데 유럽 도로를 보니까 평평한 자전거 도로도 많지만 언덕도 많은 것 같은데…
최효율: 맞아, 가파른 언덕도 많고 자전거 도로가 아직 없는 울퉁불퉁한 길도 많지. 그래도 언덕을 넘을 때는 일반 자전거는 모르겠지만 전기 자전거는 속도 조절이 쉬워서 괜찮아!
김공대: 그래? 그럼 전기 자전거는 언덕의 경사를 극복하도록 속도 조절을 도와주는 센서가 따로 있는 건가?
최효율: 그런 것 같아. 센서가 가속할 때와 아닐 때를 구분하는 데 도움이 되는 것 같더라.
김공대: 신기하다! 센서는 그걸 어떻게 구분할 수 있는 거지?
전기 자전거 센서의 작동 원리 - 안전을 확보하는 기술!
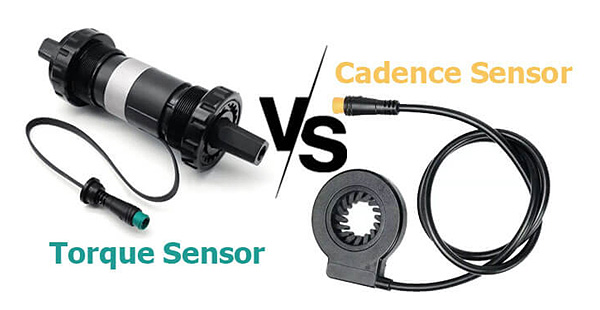
전기 자전거에 사용되는 주요 센서에는 케이던스 센서, 토크 센서, 바퀴 속도 센서 등이 있습니다. 케이던스 센서는 단순하게 말하자면 페달 회전 센서입니다. 이 센서는 바퀴가 그 순간에 실제로 돌아가고 있는지 확인해줍니다. 토크 센서의 경우, 페달에 가해지는 힘을 실시간으로 측정한 후 힘에 비례해 보조 전력을 배분하는 것을 돕습니다. 여기서 바퀴 속도 센서는 현재 속도를 제한 속도와 비교하여 이를 넘게 된다면 보조를 점진적으로 줄이고 최종적으로 차단합니다. 그렇기에 안전한 상황에서는 모터가 가속을 도와주지만, 만약 페달을 갑자기 멈추거나, 브레이크를 잡거나, 제한 속도를 넘으면 자전거가 주는 보조는 점점 줄다가 최종적으로 꺼지게 됩니다.
김공대: 우와! 생각한 이상으로 전기 자전거는 안전한 장치라는 느낌이 들어!
최효율: 그러게, 나도 맨날 타기만 했지, 전기 자전거의 공학적 원리가 이렇게 신기한 줄 몰랐어!
김공대: 그런데 유럽에서 타는 전기 자전거랑 우리가 한국에서 타는 전기 자전거랑 다를까?
최효율: 다른 것 같아! 내가 한국에서도 유럽에서도 많이 타봤는데, 종류가 다른 것 같더라.
김공대: 오 그래? 그럼 전기 자전거의 종류에 따라 어떤 차이점들이 존재할까?
전기 자전거의 종류들을 비교해보자!

전기 자전거는 모터의 위치와 허브 모터의 작동 방식에 따라 여러 유형으로 나눌 수 있습니다.
모터 위치는 앞바퀴 허브, 뒷바퀴 허브 그리고 미드 드라이브로 나뉩니다. 앞바퀴, 뒷바퀴 허브는 보통 가볍고 단순해서 일상 도심 주행에서 많이 쓰이고, 미드 드라이브는 무게 중심이 가운데에 있어 안정감이 좋고, 기어를 활용해 언덕을 오르거나 장거리를 주행할 때 효율이 가장 높다는 장점이 있습니다.
허브 모터의 작동 방식은 크게 직접 구동 방식(Direct-Drive)과 기어식(Geared)으로 나눌 수 있습니다. 직접 구동 허브모터는 큰 모터가 바로 바퀴를 돌리는 구조라 모터 구조가 매우 단순하고 높은 속도로 달릴 때 유리합니다. 다만, 모터가 무겁고, 낮은 속도에서 효율이 떨어질 수 있습니다. 반면 기어식 허브모터는 작은 모터 안에 감속기(유성기어)가 들어 있기 때문에 낮은 속도로 움직이고 있을 때 힘이 강하고 가볍다는 장점이 있습니다.
김공대: 너무 신기하다! 이렇게 전기 자전거의 종류가 다양하고 각자 장단점도 다르구나!
최효율: 그러게, 그냥 전기로 가는 자전거가 아니라 여러 기술이 조합되어 있었어!
마무리
이번 이야기를 통해 김공대는 우리가 아무렇지 않게 빌려 타는 전기 자전거 속에 모터, 배터리, 센서, 제어기 같은 다양한 공학 기술이 숨어 있다는 사실을 알게 되었습니다. 페달을 밟는 힘과 속도를 바탕으로 주행을 도와주는 전기 자전거는, 단순한 이동 수단을 넘어 이동을 더 안전하고 편리하게 해주는 공학 시스템이었던 것이죠.
김공대: 전기 자전거에 이렇게나 많은 공학 기술이 숨어 있었다니! 언젠가 나도 공학자가 되어 누군가의 일상을 더 편하고 즐겁게 만들어 줄 수 있겠지?
이렇게 이번 여행은 김공대의 공학자라는 꿈을 한층 더 키워 주었습니다. 다음에는 또 어떤 일상 속 공학 이야기가 김공대를 기다리고 있을까요?
참고
- 1) BMS(Battery Management System): 배터리의 상태를 실시간으로 모니터링하고 제어하여 안전하고 효율적으로 사용할 수 있게 해주는 시스템. 전기차, 스마트폰 등에 탑재되고, 전압, 전류, 온도 등을 측정하여 관리를 한다.
참고 문헌
- Contò, C., & Bianchi, N. (2023). E-bike motor drive: A review of configurations and capabilities. Energies, 16(1), 160. https://doi.org/10.3390/en16010160
- Gabbar, H. A., Othman, A. M., & Abdussami, M. R. (2021). Review of battery management systems (BMS) development and industrial standards. Technologies, 9(2), 28. https://doi.org/10.3390/technologies9020028
- Hollaus, B., Volmer, J. C., & Fleischmann, T. (2022). Cadence detection in road cycling using saddle tube motion and machine learning. Sensors, 22(16), 6140. https://doi.org/10.3390/s22166140
- Arango, I., Lopez, C., & Ceren, A. (2021). Improving the autonomy of a mid-drive motor electric bicycle based on system efficiency maps and its performance. World Electric Vehicle Journal, 12(2), 59. https://doi.org/10.3390/wevj12020059
- Ho, P.-J., Yi, C.-P., Lin, Y.-J., Chung, W.-D., Chou, P.-H., & Yang, S.-C. (2023). Torque measurement and control for electric-assisted bike considering different external load conditions. Sensors, 23(10), 4657. https://doi.org/10.3390/s23104657
- Arango, I., Godoy, A., & Lopez, C. (2018). E-bikes for steep roads: Mid-drive and hub-drive motor efficiency comparison. International Journal of Vehicle Systems Modelling and Testing, 13(1), 44-58. https://doi.org/10.1504/IJVSMT.2018.094587
그림 출처
- 그림1. https://secretsofparis.com/practical/using-the-velib-bike-service-in-paris/
- 그림2. https://www.mdpi.com/1996-1073/16/1/160
- 그림3. https://www.solomotorcontrollers.com/blog/diy-ebike/?srsltid=AfmBOormUWb97Kp7Z7zJLTo2sb-gNA_6oW9lpYuSel4E0RIKn2Yg1L1_
- 그림4. https://engwe-bikes-uk.com/blogs/news/torque-sensor-vs-cadence-sensor
- 그림5. https://esoulbike.com/fr/blogs/blog/geared-hub-vs-direct-drive?srsltid=AfmBOoqFJ4UmuwrCEcBQ3ARtwLZ6rO8giriDZoM20Lx85K-9dtAlnZs-